(EN)
WALL-E is a cute little robot featured in the Disney movie of the same name. I wanted to reproduce it to be able to implement my skills in order to improve them and especially to be able to discover the use of AI.
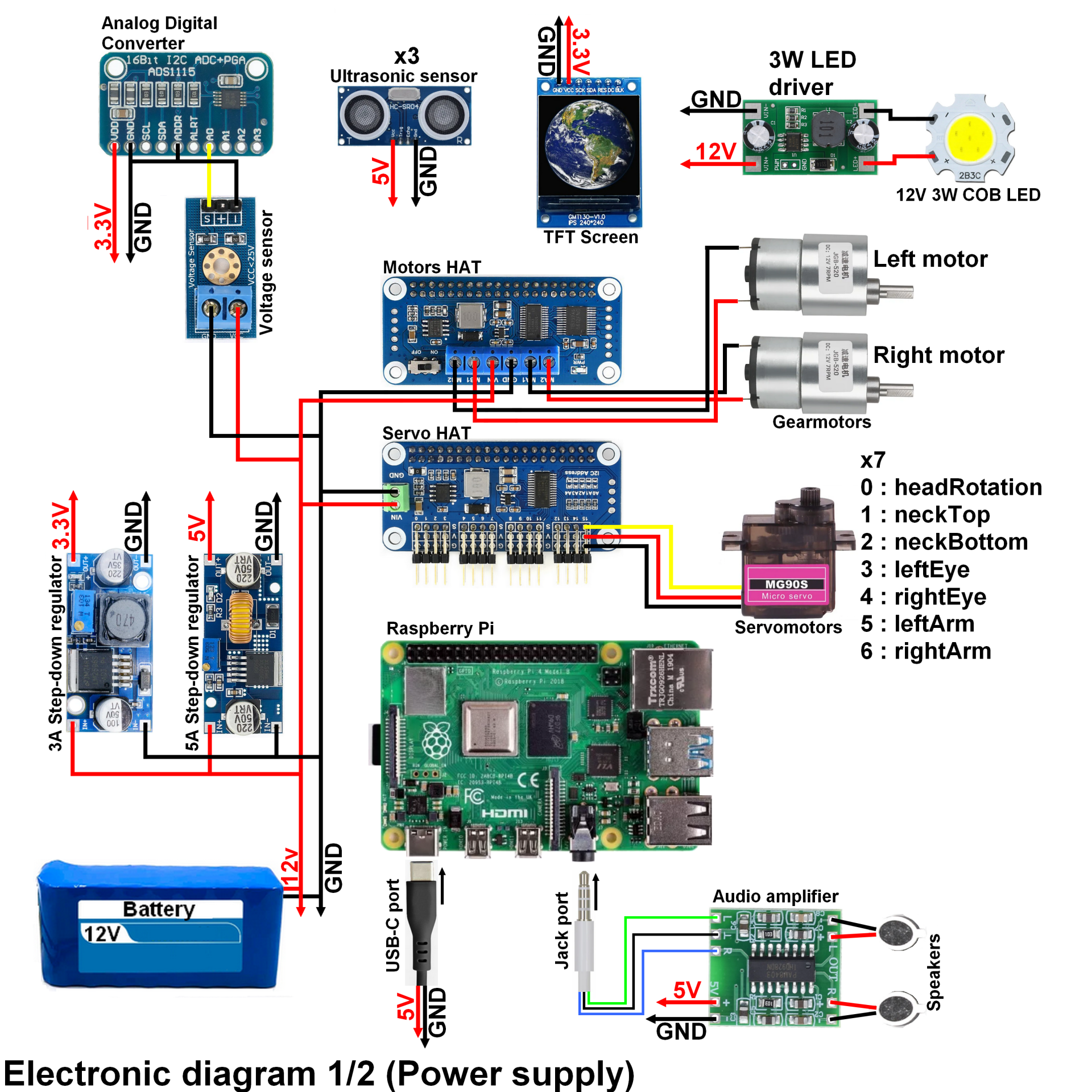
My WALL-E robot is able to move on flat ground, it can raise/lower its arms as well as move its head from left to right and up and down. He is also able to express himself through pre-recorded audios and he has a small screen to show his battery level. Finally, a camera already present will allow him in the future to move independently with the help of 2 ultrasonic sensors as well as a powerful LED which will light up when the ambient light is too low. To control all this, WALL-E has a web interface that can be accessed to interact with it manually.
(FR)
WALL-E est un mignon petit robot présent dans le film Disney du même nom. J'ai eu pour envie de le reproduire pour pouvoir mettre en oeuvre mes compétences afin de les améliorer et surtout pour pouvoir découvrir l'utilisation de l'IA.
Mon robot WALL-E est capable de se déplacer sur un terrain plat, il peut lever/baisser ses bras ainsi que bouger sa tête de gauche à droite et de haut en bas. Il est également capable de s'exprimer grâce à des audios pré-enregistrés et il possède un petit écran afin de montrer son niveau de batterie. Pour finir, une caméra déjà présente lui permettra dans le futur de se déplacer en autonomie avec l'aide de 2 capteurs à ultrasons ainsi qu'une puissante LED qui s'allumera lorsque la luminosité ambiante est trop basse. Pour contrôller tout ça, WALL-E possède une interface web à laquelle on peut accéder afin d'intéragir avec lui de façon manuelle.















Comments
1 永利体育买球技巧 On 13/06/2026
like that before. So wonderful to find someone with genuine thoughts on this issue.
Really.. thanks for starting this up. This site is something that is
required on the internet, someone with a bit of originality!
2 b2xbet On 24/01/2026
lot of things from it on the topic of blogging. thanks.
Add a comment